基于 4G 模组的 GPS 小型定位器
概述
使用 4G Cat.1 模组可以满足一些中低速数据传输的应用场景,如进行实时定位。本文介绍使用 QUECTEL 的 EG800K-CN
模组进行 GPS 定位的方法以及进行实际场景追踪测试的流程。
硬件准备
通信模组

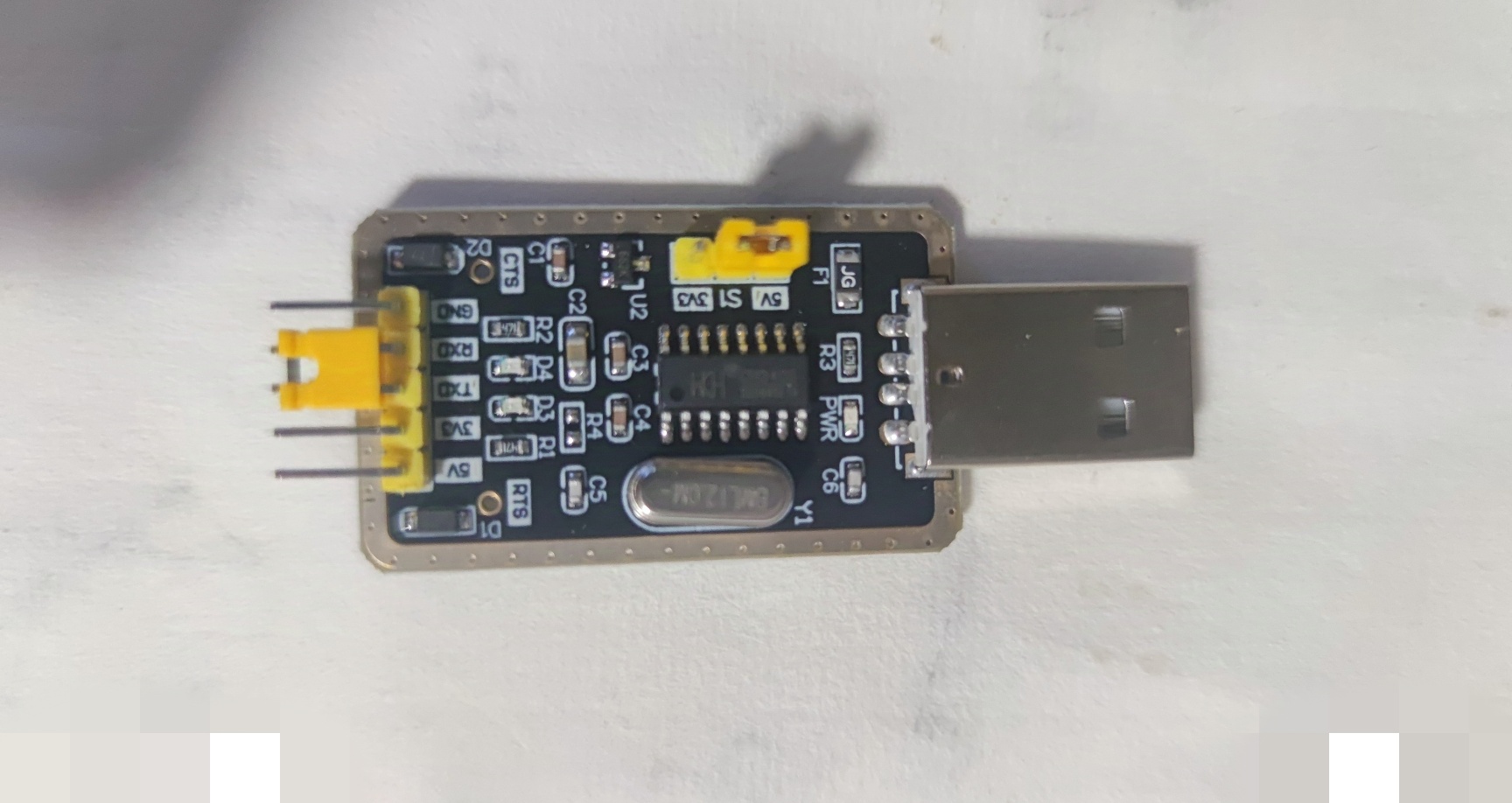
串口转换器
天线
物联网卡
软件工具准备
在 Ubuntu 22.04 上如果无法为 ch340串口转 USB 工具生成 ttyUSBx 设备文件,并显示下面的错误:
1 | usb 3-1: usbfs: interface 0 claimed by ch341 while 'brltty' sets config #1 |
表明出现了驱动占用问题,此时卸载 ‘brltty’ 即可:
$ sudo apt-get remove brltty
最后重新插拔设备。
串口工具
在 Ubuntu 下可以使用 CuteCom 串口工具,连接设备后,发送 ATI 命令,获取如下信息:
1 | [17:31:24:250] Quectel␍␊ |
表明通信正常
AT 命令测试
基本信息
1 | $ ATI # 获取 MT 的 ID 信息 |
SIM卡信息
将 SIM 物联网卡 插入 4G 模组中:
1 | $ AT+CIMI # 查询 IMSI |
网络信息
连接上 GNSS 天线(可使用有源天线或者无源天线)和 LTE 天线。
1 | $ AT+QCFG="nwscanmode" # 查询支持的网络制式 |
关于接入技术: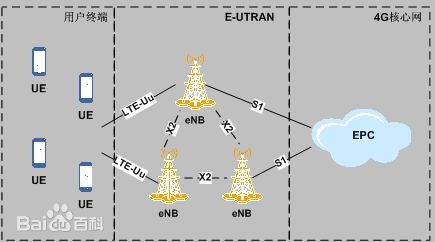
硬件相关信息
1 | $ AT+CCLK? # 查询模块实时时钟(RTC) |
分组域相关信息
1 |
定位
测试 GPS
1 | $ AT+QGPSCFG="outport", "uartdebug" # 配置 NMEA 语句输出端口 |
创建云平台实例
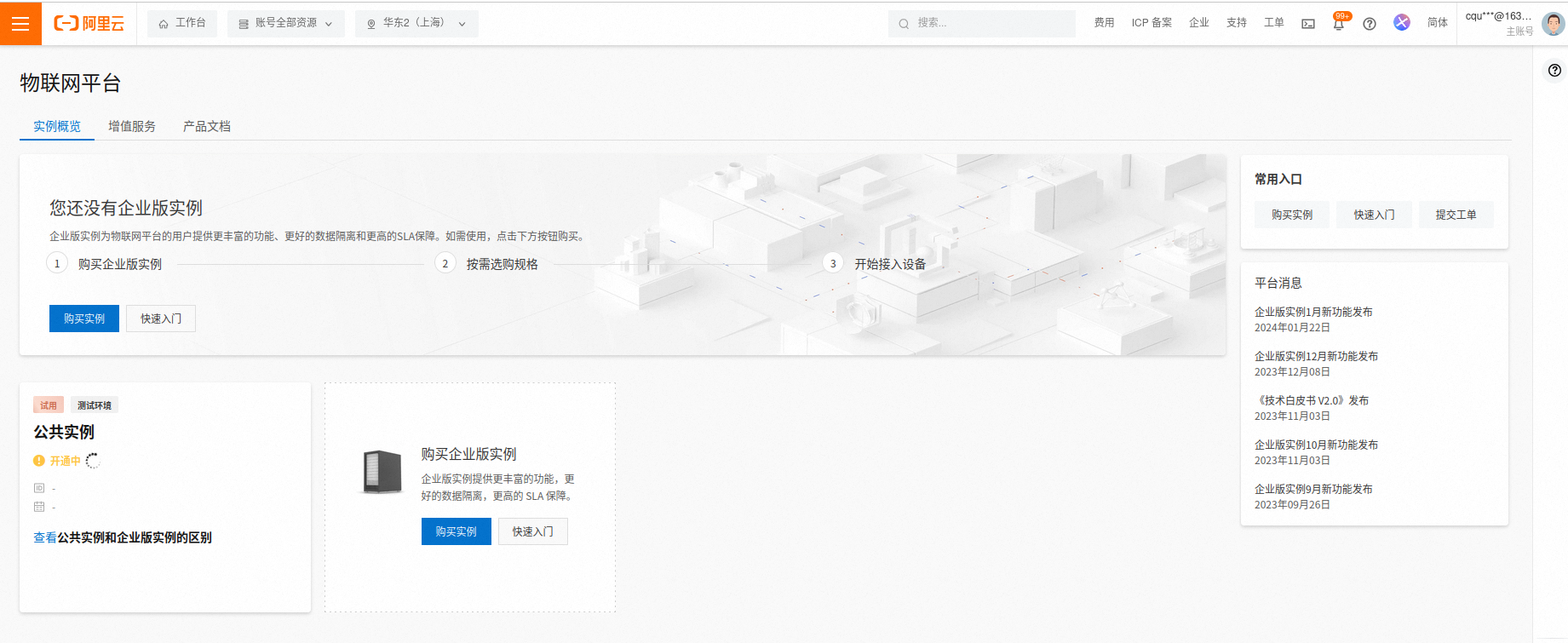
在阿里云物联网平台 开通公共实例,如下图所示:
创建产品

创建设备
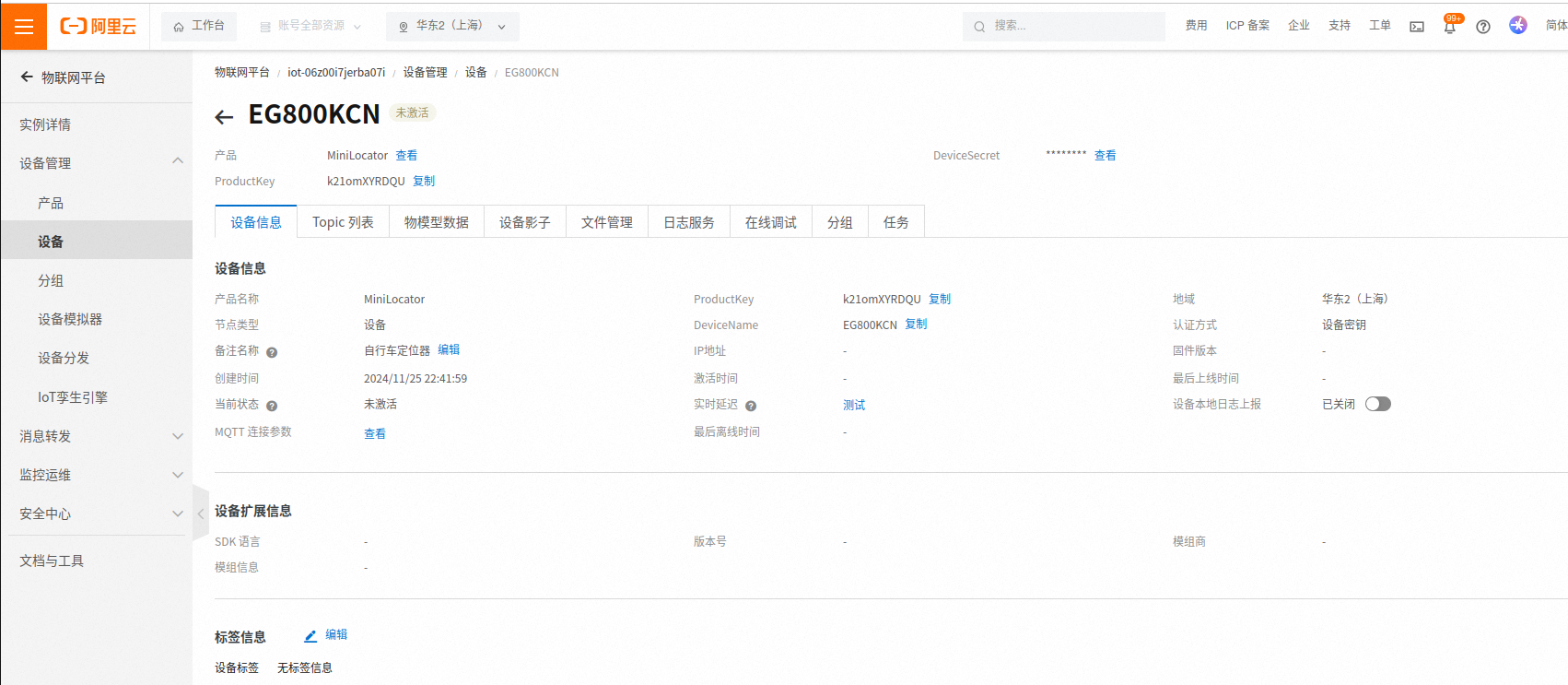
注意生成的设备证书和 MQTT 连接参数。
使用 MQTT 协议连接云平台
不使用 SSL
1 | # 配置消息接收模式 |