RaspberryPi5 And AI Hailo8L Tutorial
概述
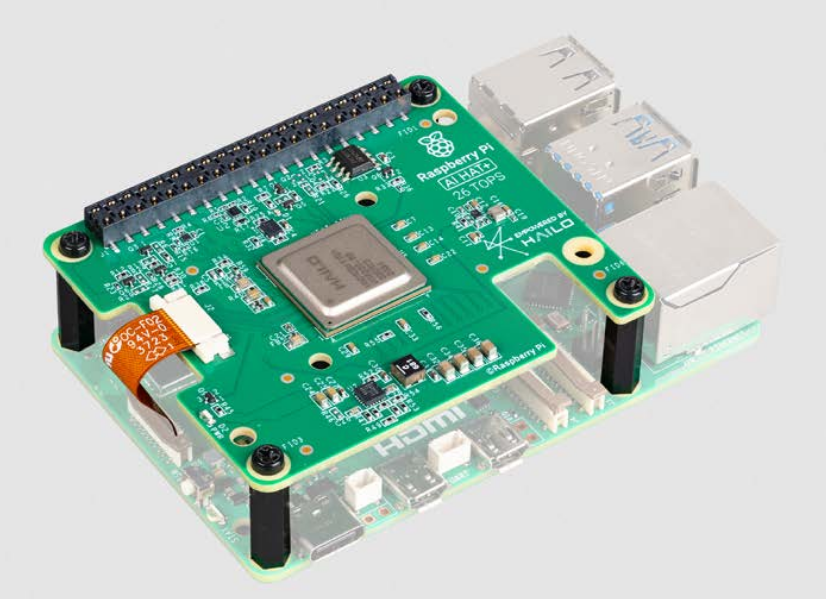
Raspberry Pi 5 树莓派 AI 套件将树莓派 M.2 HAT+ 与 Hailo AI 加速模块捆绑在一起,用于树莓派 5。
环境准备
温度传感器
获取当前温度:$ vcgencmd measure_temp
可以使用 stress 命令来手动增加 CPU 负载,观察 CPU 温度变化。$ stress --cpu 4
Raspberry 的 Active Cooler 主动冷却器由固件主动控制:在 60°C 时,鼓风机风扇将打开,在 67.5°C 时风扇速度将增加,最后在 75°C 时风扇增加到全速。
当温度回落到这些限制以下时,鼓风机的风扇将自动停止旋转。
摄像头
在 RaspberryPi OS Lite 系统中使用第三方摄像头需要更改启动配置。首先更改 config.txt:
a. 关闭摄像头自动检测
1 | # camera_auto_detect = 1 |
b. 设置 dtoverlay 为所使用的摄像头型号(以 imx219 为例):
1 | dtoverlay=imx219 |
c. 测试$ rpicam-hello
d. 使用 VLC 搭建实时视频流服务器
1 | sudo apt-get install vlc |
网络配置
安装 raspberry pi OS 时会提示进行网络配置,最后配置信息会写入:/etc/NetworkManager/system-connections/preconfigured.nmconnection
配置路由优先级(使用 NetworkManager):
1 | sudo nmcli d modify wlan0 ipv4.route-metric 100 |
硬件相关,使用 ethtool 工具:
1 | sduo ethtool eth0 # 查看网卡的信息 |
网络测速
远程桌面
a. 使用 raspi-config 使能 VNC,打开 VNC 服务器。
b. 在客户机安装 tigervnc-viewer VNC 客户端。
AI 测试
硬件准备
a. 连接 Raspberry 5 开发板、摄像头以及 AI HAT+。注意在连接前,检查固件版本是否最最新的:$ sudo rpi-eeprom-update。
b. 为了更好地利用 NPU 的性能,建议使能PCIe Gen 3.0
c. 安装 hailo AI 软件套件:$ sudo apt-get install hailo-all,这些软件包括:
- Hailo 内核设备驱动和固件
- HailoRT 中间层软件
- Hailo Tappas 后处理核心库
- demo 包
(注意,如果下载速度过慢,可以更换国内的 debian 镜像源)
d. 重启
e. 确认软硬件环境一切 OK:
1 | hailortcli fw-control identify |
后面三个编号为 <N/A> 对 AI HAT+ 设备来说是正常的,不影响实际的功能。
如果得到下面的输出:
1 | CHECK failed - Driver version (4.18.0) is different from library version (4.20.0) |
则需要更新系统:
1 | sudo apt update |
Demo
rpicam-apps 软件套件实现了一个后处理框架(post-processing framework)。
$ sudo apt update && sudo apt install rpicam-apps
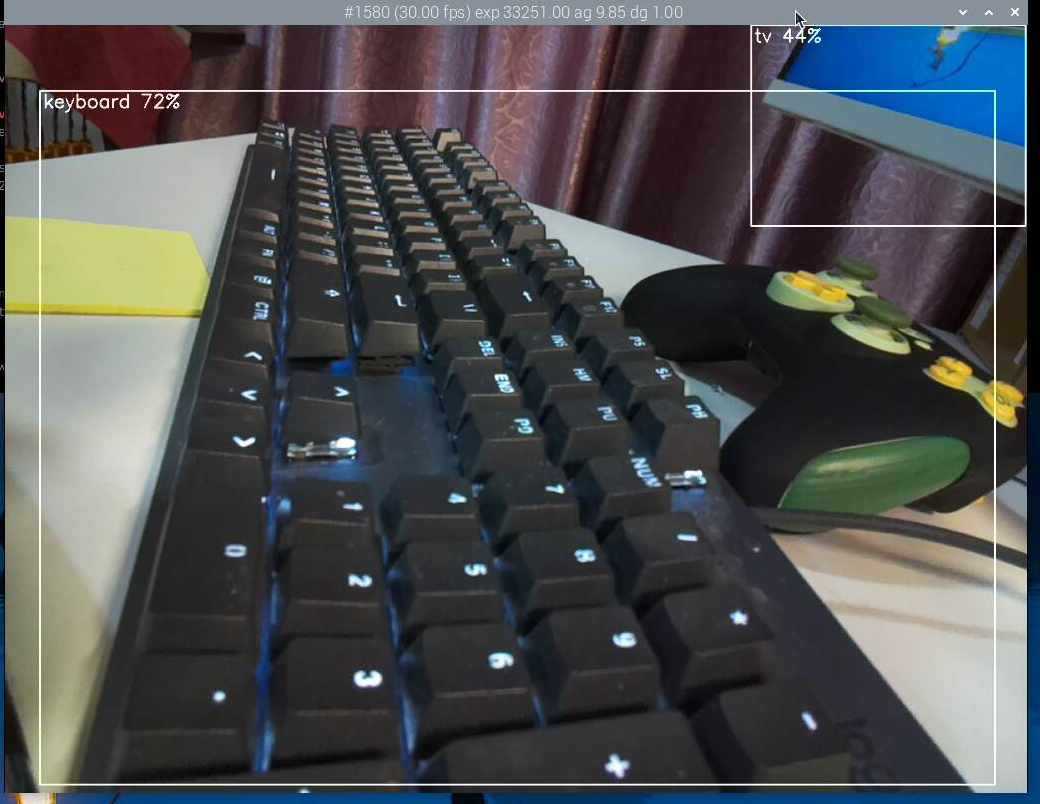
对象检测(Object Detection)
该 demo 使用神经网络识别特定对象,并使用方框进行标记。下面以 YOLOv6 模型 为例:
1 | rpicam-hello -t 0 --post-process-file /usr/share/rpi-camera-assets/hailo_yolov6_inference.json |
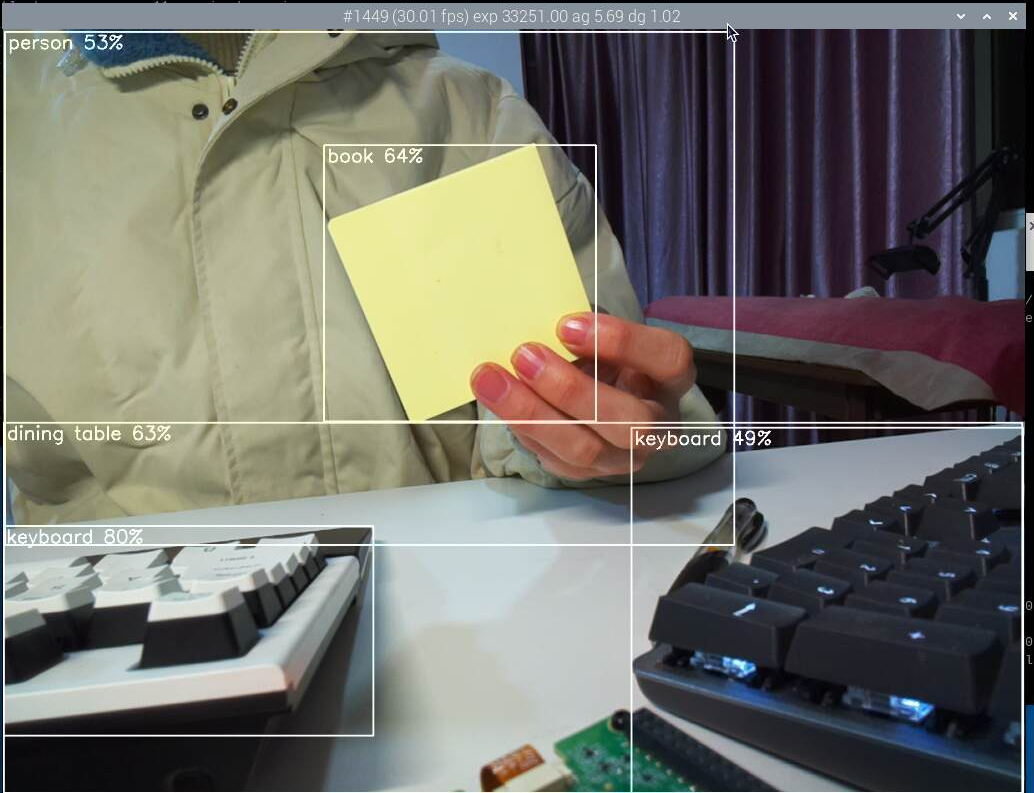
使用 YOLOv8 模型后实物检测和实例分割更准确:
1 | rpicam-hello -t 0 --post-process-file /usr/share/rpi-camera-assets/hailo_yolov8_inference.json |
还可以使用 YOLOX 模型、 使用YOLOv5模型进行人脸识别:
1 | rpicam-hello -t 0 --post-process-file /usr/share/rpi-camera-assets/hailo_yolov5_personface.json |
图像分割
使用 YOLov5 模型进行图像分割:
1 | rpicam-hello -t 0 --post-process-file /usr/share/rpi-camera-assets/hailo_yolov5_segmentation.json --framerate 20 |
如果输出未找到 /usr/share/hailo-models/yolov5seg.json,可以在 tappas-github 中另行下载。
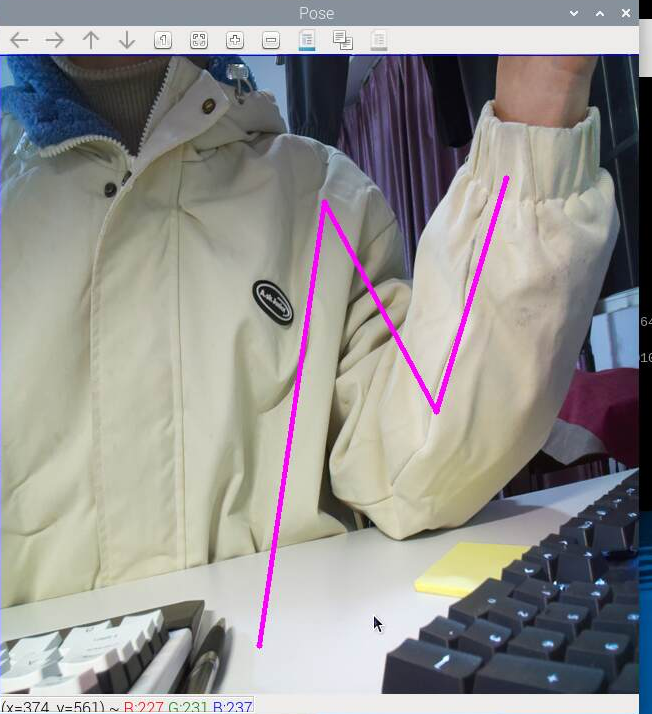
姿态估计
下面的 demo 进行了 17 个点的人体姿态模拟:
1 | rpicam-hello -t 0 --post-process-file /usr/share/rpi-camera-assets/hailo_yolov8_pose.json |